CommDriverN0183Serial Class Reference
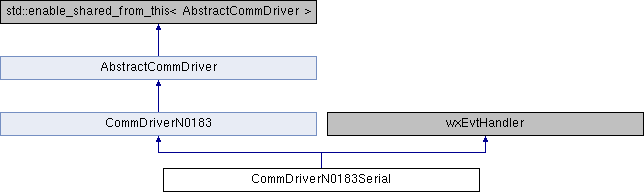
Inheritance diagram for CommDriverN0183Serial:
Public Member Functions | |
| CommDriverN0183Serial (const ConnectionParams *params, DriverListener &l) | |
| void | Activate () override |
| Register driver and possibly do other post-ctor steps. | |
| bool | Open () |
| void | Close () |
| void | SetSecThreadActive (void) |
| void | SetSecThreadInActive (void) |
| bool | IsSecThreadActive () const |
| bool | IsGarminThreadActive () |
| void | StopGarminUSBIOThread (bool bPause) |
| void | SetSecondaryThread (CommDriverN0183SerialThread *secondary_Thread) |
| CommDriverN0183SerialThread * | GetSecondaryThread () |
| void | SetThreadRunFlag (int run) |
| ConnectionParams | GetParams () const |
| bool | SendMessage (std::shared_ptr< const NavMsg > msg, std::shared_ptr< const NavAddr > addr) override |
 Public Member Functions inherited from CommDriverN0183 Public Member Functions inherited from CommDriverN0183 | |
| CommDriverN0183 (NavAddr::Bus b, const std::string &s) | |
| void | SetListener (DriverListener &l) override |
| Set the entity which will receive incoming data. More... | |
| virtual std::shared_ptr< NavAddr > | GetAddress () |
| Public Member Functions inherited from AbstractCommDriver | |
| virtual std::pair< CommStatus, std::string > | Clone () |
| Create a new virtual interface using a new instance of this driver. More... | |
| std::string | Key () const |
| virtual std::unordered_map< std::string, std::string > | GetAttributes () const |
Public Attributes | |
| std::atomic_int | m_Thread_run_flag |
| Public Attributes inherited from AbstractCommDriver | |
| const NavAddr::Bus | bus |
| const std::string | iface |
| Physical device for 0183, else a unique string. | |
| std::unordered_map< std::string, std::string > | attributes |
Additional Inherited Members | |
| Protected Member Functions inherited from AbstractCommDriver | |
| AbstractCommDriver (NavAddr::Bus b) | |
| AbstractCommDriver (NavAddr::Bus b, const std::string &s) | |
Detailed Description
Definition at line 55 of file comm_drv_n0183_serial.h.
The documentation for this class was generated from the following files:
- /home/runner/work/OpenCPN/OpenCPN/model/include/model/comm_drv_n0183_serial.h
- /home/runner/work/OpenCPN/OpenCPN/model/src/comm_drv_n0183_serial.cpp